
In today's demanding metal processing and fabrication environments, optimizing material handling is paramount for achieving efficiency, safety, and cost-effectiveness. Handling heavy, often unwieldy coils requires robust solutions that minimize manual intervention and maximize throughput. Robotic coil stacking systems represent a significant advancement in end-of-line automation, offering precision, speed, and flexibility. This article delves into the technical specifications, design considerations, and operational benefits of utilizing robots for automated coil stacking, particularly as an integrated component following a coil packing line.
1. The Challenge: Limitations of Manual Coil Stacking
Traditional manual or semi-automated methods for stacking packed coils often present several challenges:
- Safety Risks: Manual lifting and positioning of heavy coils pose significant ergonomic hazards to personnel.
- Inconsistent Stacking: Variations in manual stacking can lead to unstable loads, potential product damage during storage or transit, and inefficient use of space.
- Speed Bottlenecks: Manual handling can be slow and labor-intensive, hindering overall line productivity, especially in high-volume operations.
- Product Damage: Improper handling can damage coil edges or surfaces, leading to scrap or rework costs.
Automated robotic stacking systems directly address these issues, providing a reliable and efficient alternative.
2. Robotic Coil Stacking System: Operational Overview

A typical robotic coil stacking system operates seamlessly at the end of a production or packing line. The general workflow involves:
- Coil Arrival: A packed coil arrives at a designated pick-up point, often via a conveyor from the upstream packing machine.
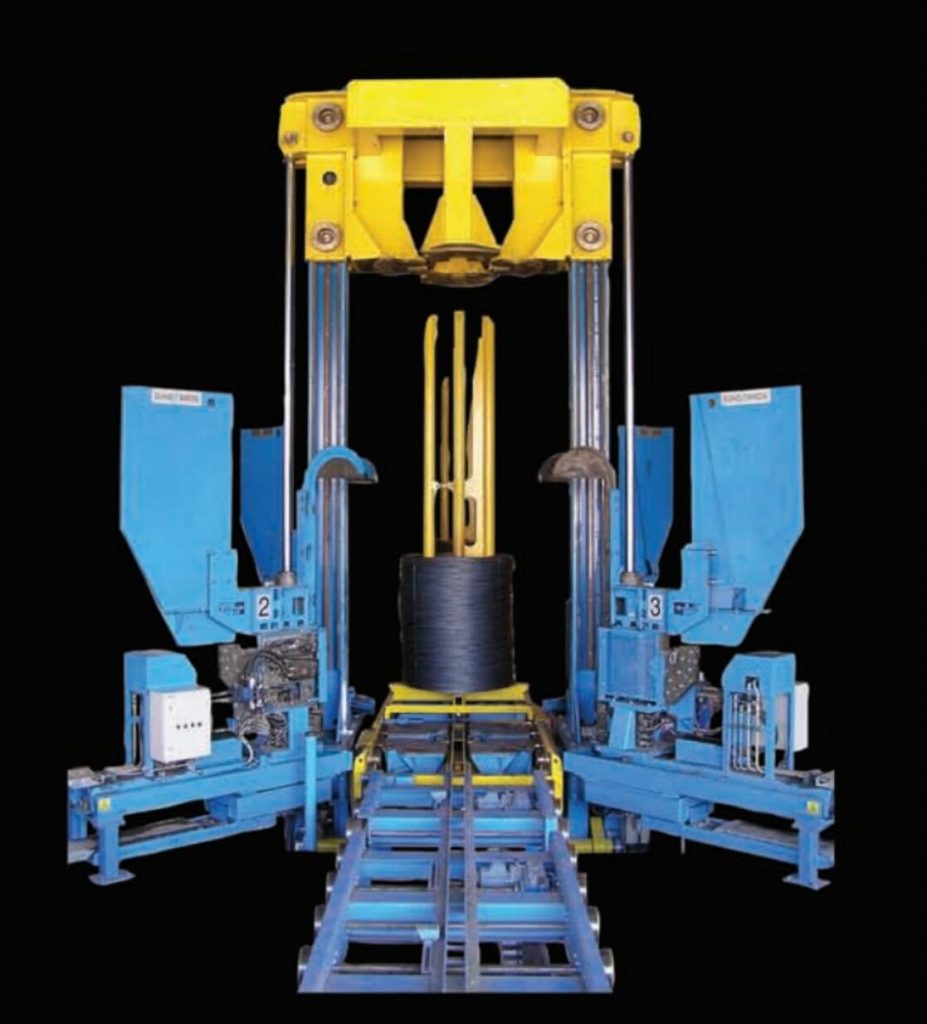
- Robot Pick-up: The industrial robot, equipped with a specialized End-of-Arm Tooling (EOAT), identifies and securely grips the coil.
- Transport & Orientation: The robot arm swiftly and precisely transports the coil to the designated stacking location (e.g., a pallet or staging area). It may orient the coil as needed based on the programmed stacking pattern.
- Placement: The robot carefully places the coil onto the pallet or the existing stack, ensuring accurate positioning for stability.
- Multi-Station Capability: Advanced systems often utilize a single robot to service multiple pallet stations (e.g., four stations), allowing for continuous operation while full pallets are removed and empty ones are supplied.
3. Key Design Features and Components
The effectiveness of a robotic coil stacker hinges on its core components and design:
- Industrial Robot Arm: Typically a 6-axis articulated robot arm is used, providing the necessary flexibility and reach to handle coils and access different points within the work cell. Payload capacity and reach are selected based on the maximum coil weight and the layout of the stacking area.
- End-of-Arm Tooling (EOAT) / Clamper: This is a critical component tailored to the specific coil characteristics. Common designs include:
- Fork Grippers: Suitable for handling coils by their inner diameter (ID) or supporting them from underneath.
- Magnetic Lifters: Effective for ferrous materials (steel coils), providing a secure grip on the coil's flat surface. Requires careful consideration for residual magnetism.
- Vacuum Lifters: Ideal for coils with smooth, non-porous surfaces (e.g., certain types of aluminum or coated materials), offering gentle handling.
- Custom Clamps: Mechanical clamps designed to grip the outer diameter (OD) or specific features of the coil.
- Control System: A robust Programmable Logic Controller (PLC) manages the robot's movements, coordinates actions with upstream/downstream equipment (like the coil packing line), and oversees safety logic. An intuitive Human-Machine Interface (HMI) allows for operator control, monitoring, recipe management (different coil sizes/stack patterns), and diagnostics.
- Safety Systems: Essential for protecting personnel. Typically includes safety fencing, light curtains or area scanners at entry points, interlocked gates, and emergency stops, all designed to comply with relevant safety standards (e.g., ISO 10218, ANSI/RIA R15.06).
- Pallet Stations: Defined locations where empty pallets are placed and coils are stacked. These can range from simple floor locations to automated pallet dispensers and conveyors for fully unmanned operation.
4. Technical Specifications and Performance Data Comparison
While specific parameters vary based on the application, typical performance data for robotic coil stacking systems include:
| Specification | Typical Range / Value | Notes |
|---|---|---|
| Handling Speed | 4 - 10+ seconds per coil | Dependent on travel distance, robot model, coil weight, EOAT type |
| Robot Payload | 100 kg - 2000+ kg | Must exceed max coil weight + EOAT weight |
| Maximum Stack Height | 1.0 m - 2.5 m+ | Limited by coil stability, pallet strength, safety regulations |
| Positional Accuracy | ± 1 mm to ± 5 mm | Critical for building stable, uniform stacks |
| Robot Reach | 1.5 m - 3.5 m+ | Must cover pickup point and all stacking positions |
| Supported Coil OD | Customizable (e.g., 500 mm - 1500 mm) | Determined by EOAT design and robot capacity |
| Supported Coil Width | Customizable (e.g., 100 mm - 800 mm) | Influences EOAT design and stack stability |
| Station Capacity | Typically 2 - 4 pallets per robot | Allows continuous operation during pallet exchange |
| Control System | PLC (e.g., Siemens, Allen-Bradley) + HMI | Integration via Profinet, Ethernet/IP, etc. |
Note: These are representative values. Actual specifications are highly dependent on the specific application requirements.
5. Seamless Integration with Coil Packing Lines
A key advantage is the system's ability to integrate directly with the end of a coil packing line. This creates a fully automated workflow from packing to palletizing. Integration involves:
- Communication Handshake: The PLC of the stacking system communicates with the packing line controller to signal readiness to receive a coil and confirm successful pickup.
- Buffering: Short buffer conveyors may be used between the packing machine and the robot pickup station to decouple the systems slightly and ensure smooth flow.
- Line Speed Synchronization: The robot's cycle time is designed to match or exceed the output rate of the packing line to prevent bottlenecks.
6. Customization for Application Flexibility
Robotic coil stackers are not one-size-fits-all. Customization is key:
- Coil Types: Systems can be designed for various materials (steel, aluminum, copper), shapes (slit coils, wire coils), and sensitivities (oiled, dry, painted, polished).
- EOAT Selection: Choosing the right gripper (magnet, vacuum, fork, clamp) is crucial based on coil material, weight, surface, and ID/OD.
- Stacking Patterns: The robot can be programmed for various patterns (single column, multiple columns per pallet, interleaving layers) to maximize pallet density and stability.
- Layout Adaptation: The system layout can be configured to fit available floor space and integrate with existing facility infrastructure.
7. Operational Experience: Reliability and ROI
From an operator's perspective and considering the return on investment (ROI), these systems offer significant advantages:
- Enhanced Throughput: Consistent, fast cycle times significantly increase the number of coils processed compared to manual methods.
- Improved Workplace Safety: Eliminates heavy manual lifting, drastically reducing the risk of musculoskeletal injuries.
- Reduced Product Damage: Precise and gentle handling minimizes scratches, dents, and edge damage.
- Consistent Stack Quality: Uniform and stable stacks improve safety in warehousing and transport and optimize space utilization.
- Labor Optimization: Frees up personnel from repetitive, strenuous tasks, allowing them to be reassigned to more value-added roles like quality control or machine supervision.
- High Reliability: Industrial robots are designed for high-duty cycles and long operational life with planned preventive maintenance. Modern HMIs simplify operation, recipe changes, and troubleshooting.
8. Key Considerations for Implementation
Before investing in a robotic coil stacking system, fabricators should consider:
- Floor Space and Layout: Ensure adequate space for the robot work cell, safety zones, and pallet staging areas.
- Foundation Requirements: The floor must support the static and dynamic loads of the robot.
- Utilities: Sufficient electrical power and compressed air (if pneumatic grippers are used) are required.
- Integration Planning: Careful coordination with existing upstream and downstream equipment is necessary.
- Operator and Maintenance Training: Staff needs to be trained on operating and maintaining the robotic system safely and effectively.
Conclusion: A Strategic Investment in Efficiency
The robotic stacking machine for coil handling represents a powerful solution for modern metal processing and fabrication facilities. By leveraging automation, these systems deliver tangible benefits in productivity, safety, consistency, and operational flexibility. With customizable designs capable of handling diverse coil specifications and integrating smoothly into existing lines, investing in robotic coil stacking is a strategic move towards optimizing end-of-line operations and enhancing overall competitiveness.